Michelle Wang learned about drone theory, math, and computer vision during her first two weeks of the Autonomous Air Racing program at MIT Beaverworks.
“In the beginning of the week, we learned a lot of math for both drone kinematics and vision. On Monday, we talked about the foundational math for vision and kinematics: matrices, derivatives, and convolution. Later, we focused on drone kinematics and learned about reference frame transformations using rotation matrices,” Michelle explains.
“As a class, we derived the rotation matrix formulas as well as some physics formulas that describe quadcopter motion. We also briefly discussed quaternions which confused everyone. I mostly enjoyed these math sessions, but it was definitely a lot,” Michelle adds.
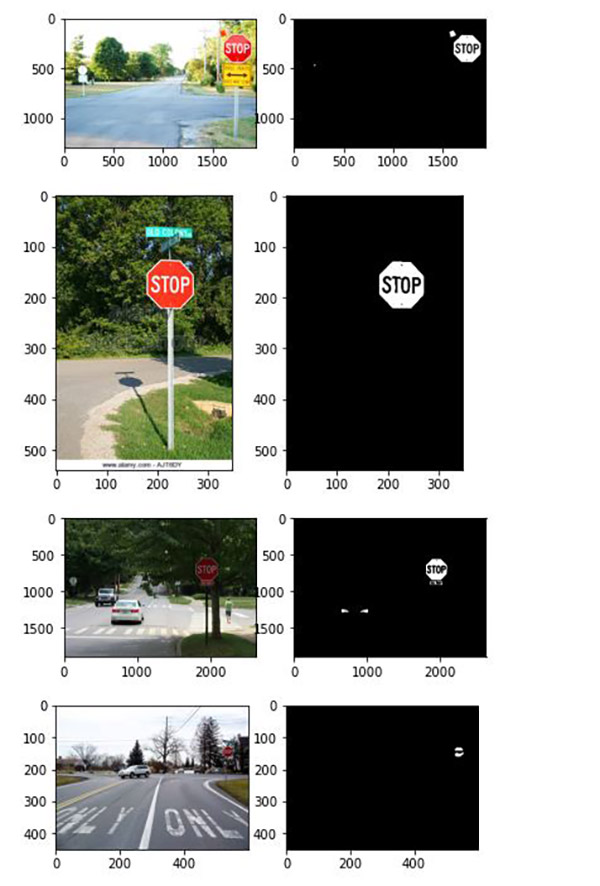
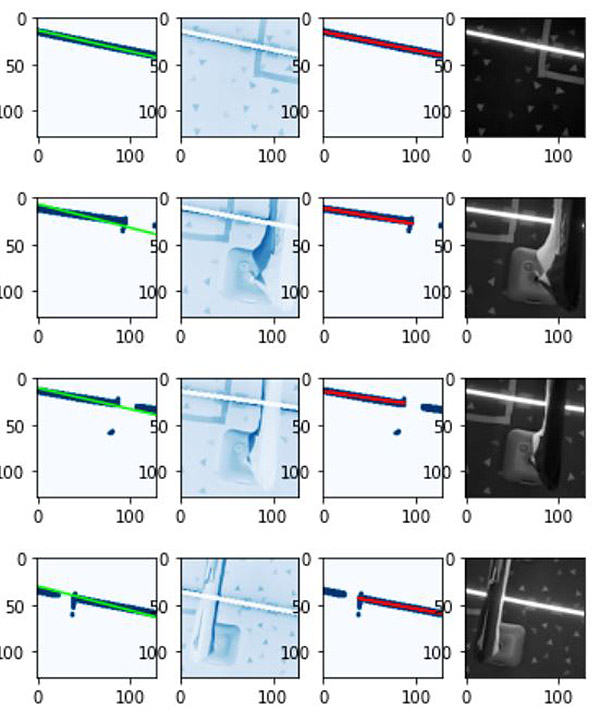
During the second week of the course, Michelle and her classmates learned about computer vision and related concepts. “After each lecture, we worked on coding problems in groups to apply what we had learned. In three short days, we covered topics such as thresholding, image morphology, regression, edge detection, and color segmentation. We had a challenge where we worked in groups to write code that traces an LED light strip and fits a line to that strip,” Michelle explains.
“I am quite interested in computer vision now because it is so useful for robotics applications. Before this course, I only knew what computer vision is on a high level, but now I feel that I have a better understanding of the basics,” Michelle adds.
In addition to class lectures, Michelle has been attending lunch seminars and getting to know her classmates through collaborative projects and activities. “My favorite speaker was Dr. Dina Katabi who talked about her work in tracking human movement and health metrics (heart rate, sleep, etc.) using wireless signals. This technology has so many applications, especially in healthcare,” Michelle reports.
“In all, my experience at BWSI has been phenomenal so far. It’s quite challenging, but I enjoy the work, and I’ve luckily been able to keep up so far. I am very excited for next week when we will start applying the first two weeks’ information to program the drone,” Michelle exclaims!
Michelle really enjoyed her third week of class at BWSI. “We mostly focused on controls this week, which is an area of robotics that I hadn’t learned about before. In lecture, we discussed topics like state observers and estimators, different path planning algorithms (bug algorithms, potential field, wavefront), and robotic controllers (bang-bang, PID). We did a few practicals related to these topics, but the bulk of the practice was done with the Tello drones we received from BWSI,” Michelle reports.
“The Tello drone is a mini quadcopter that weighs 80 grams and is suited for indoor flight. It can receive commands from Python programs running on a laptop. All the processing is done on the computer since Tello does not have sophisticated computing capabilities. We used our knowledge of computer vision from last week and our new controls knowledge to program the drone to do a variety of tasks,” Michelle says.
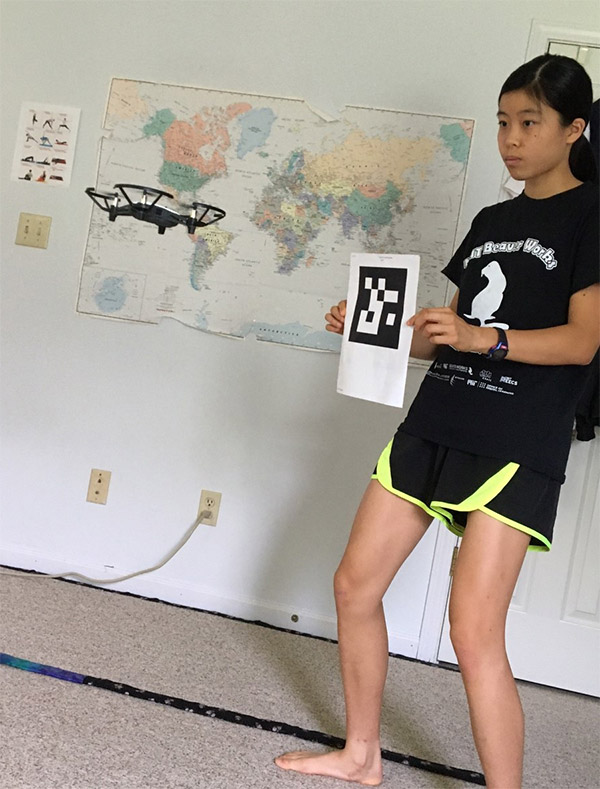
“Two of the most complex tasks involved using the drone’s camera to track an Aruco marker (sort of like a simple QR code) and using Proportional Integral Derivative (PID) algorithms to control the drone’s movement. In the first task (see photo at right), the drone hovers in place and turns around to precisely track the position of the Aruco marker as I move the marker around the drone,” Michelle adds.
“In the second task (see video at right), the Aruco marker is taped on the wall, and the drone flies up to it and stops at a predefined distance. If you nudge the drone out of place or start it at an offset position, the drone will always return to that predefined place. I have never worked with PID before, and this task showed me how powerful this simple algorithm is,” Michelle explains.
The week also included a presentation on Biometric Robotics by Dr. Sangbae Kim, and a presentation by Allen Chen (the Entry, Descent, and Landing Team Lead for Mars 2020) who spoke to the class on his role in the mission.
“I found Dr. Kim’s work extremely interesting and something I might want to pursue in the future. It was super cool to hear the details about the Perseverance rover’s landing from an insider. This talk gave me a new appreciation for just how complex NASA’s missions are,” Michelle says.
“At the end of the week, our instructors revealed the final challenge, which we will spend next week working on. We are using this weekend to form teams and solidify our ideas. More details on the challenge to come next week,” Michelle exclaims!
During her final weeks at BWSI, Michelle and classmates learned about robotic controls, state estimation, and path planning algorithms. They also learned how to program drones (see videos at right).
“By tradition, the last week of BWSI is always taken up by a final challenge that utilizes everything we learned in the past three weeks. Our class’s final challenge was really open-ended: we were supposed to come up with any project that utilizes the previous weeks’ material and work in teams to make our idea happen. I wanted to program the drone to fly through some sort of obstacle course autonomously. Several of my classmates had similar ideas, and we formed a team of three. We decided to use pool noodles and tape (lots and lots of tape) to make and position hoops for the drone to fly through. Our goal was for the drone to be able to fly through any obstacle configuration autonomously,” Michelle explains.
“On Sunday—the last day of the program, BWSI hosted a big final event with presentations from all the teams in all the classes. It was incredible to see all the different things other people were working on. We also presented our project on this day. At the end of the final event, we found out that our project had won the grand prize out of the seven teams in our class! This was a really exciting way to cap off the program,” Michelle adds.
“BWSI has been an amazing experience. I have learned so much technical content and created a pretty awesome final project. It has definitely encouraged me to keep pursuing engineering. Perhaps even more importantly, I have learned lessons that have wider applications. This was the first time I truly appreciated the power of a well-communicating team: we could never have done the whole final project by ourselves individually,” Michelle says.
Excellent job, Michelle. Congratulations to you and your team!
>> Read Michelle Wang’s final report (PDF file, 115 KB).
>> Learn about the other students’ experiences in the GFF Scholarship Program.